Many products and services rely on the user’s hands and arms to manipulate controls, move objects and exert force, e.g. to turn a lever or push open a door. This page therefore describes how product use is affected by various user capabilities related to the hands and arms, which can be broadly categorised under Reach & Dexterity. It examines the extent to which people can reach with their arms, because this can affect which controls or parts of an object can be reached and thus manipulated. It also discusses the abilities to carry objects, exert force and manipulate controls. These abilities overlap to some extent so some information may be repeated in different sections on this page.
On this page:
- Introduction
- Positioning of controls
- Product shape: Flexibility of use
- Product shape: Suitability for the task
- Product shape: Ease of gripping
- Product shape: Contact area
- Force requirements
- Precision requirements
- Other task requirements
- Environmental context
- Population statistics
- Further information
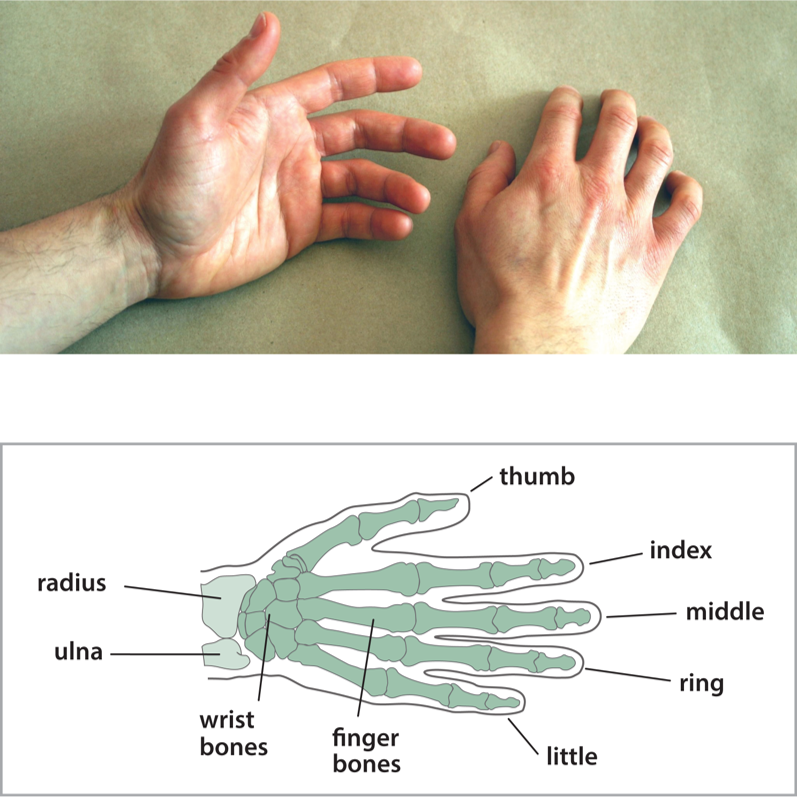
The shape and structure of hands.
Important note
This page highlights factors to consider when designing or assessing products, and provides some useful suggestions, but the advice should be followed within the context of an Inclusive design process.
Introduction
Most products require the user to physically manipulate controls, move or pick up objects or exert force. It is usually expected that these tasks will be performed by the hands and arms, although alternative interactions may be possible.
To manipulate controls or objects, the user must first be able to reach the relevant items, and then exert a force on them. There are many different types of force that can be exerted, from using an individual finger to push a button to using the whole hand together with arm and body muscles to pick up an object or push open a door.
We often use both hands at the same time to manipulate objects. This coordinated movement requires strength and dexterity in the fingers together with sensory capability and motor control.
There are many causes of pain that can limit strength and dexterity. Arthritis is one example that is particularly prevalent for older people, causing stiffness, swelling and pain in the joints. The satisfaction level for using a product is seriously affected when it causes pain, even if the product is still usable.
Many able-bodied people will experience temporary bruising or breakages that can affect their dexterity capability. This causes frustration, particularly when attempting to use products that require unusually high levels of strength or two-handed co-ordination.

Some products require the user to grip them. The type of grip can vary: some use the whole hand, while others just use the fingers. Different amounts of force may also be required.
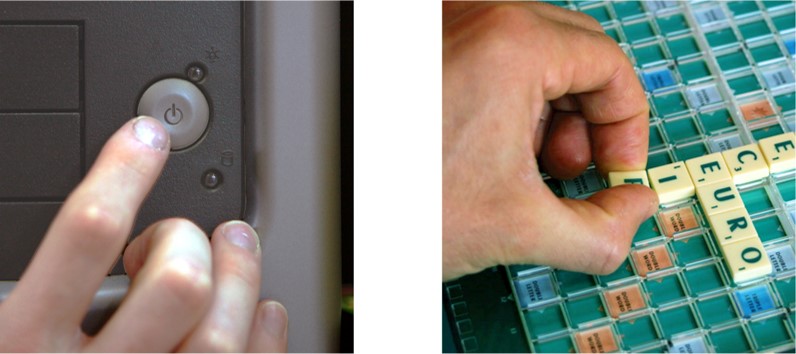
Some products require force to be exerted with a degree of precision, such as pushing a small button or picking up a small object, such as a Scrabble piece.
Positioning of controls
When using a product with their hands, users must first be able to reach it.
The extent of a user’s reach depends on how far he or she can bend, as well as on the range of motion of the elbow and shoulder joints. The distance that they can reach might be significantly less than the length of their arms. The absolute position that can be reached is also influenced by ergonomic factors such as body height and arm length, together with considerations such as wheelchair use.
Age-related conditions such as arthritis can cause reductions in joint mobility and stiffness. These limit reaching ability. Temporary injuries such as a broken or bruised arm or collarbone also affect the distance a person can reach. Environmental factors, such as wearing heavy clothing and carrying objects, can also restrict reach.
Reaching becomes more difficult as the arm moves further away from the rest position, particularly to the side or back. Requiring people to reach above their heads is also more demanding than requiring them to reach out in front.
Reaching is more difficult when two arms have to reach out simultaneously. This is particularly problematic if one arm is temporarily or permanently disabled, or if the user is carrying other objects, such as tools, handbags or carrier bags.
Important things to consider in design are to:
- Consider clearance. Make sure there is sufficient clearance for the hand and arm to be able to reach the controls without obstruction.
- Allow ambidextrous use. Provide the option to operate a product by reaching out either the left or right arm, and try to avoid requiring both arms to be reached out at the same time.
- Consider different user heights. Ensure that products or services requiring public access can cope with the range of heights that people can reach to, including the reach capabilities of those in wheelchairs.
- Avoid awkward reach requirements. Avoid requiring users to reach above their head or behind their back, where possible, and note that the ability to exert forces will be greatly diminished when the arms are in these positions.
- Consult ergonomic data sources. These contain detailed data on reach. Some examples are given in the Further information section of this page.
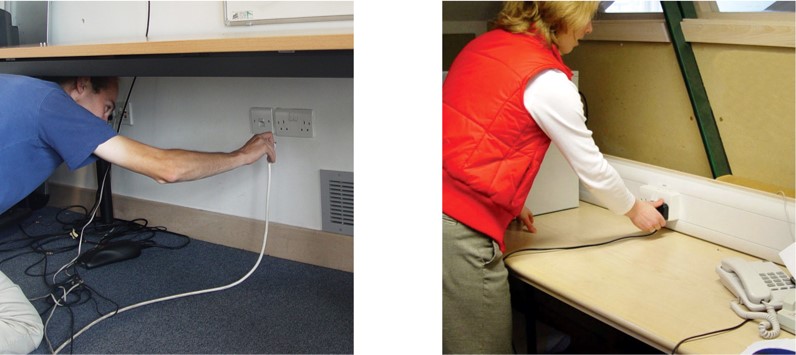
Providing plug sockets above desks makes them significantly easier to reach.

Wearing heavy clothing or carrying shopping may restrict the mobility and reach of the arms.
Product shape: Flexibility of use
Different product shapes enable the user to grip and operate a product in different ways. Different users may prefer to use different types of grip, depending on what they are familiar with and the size and capabilities of their hands. Products that can be gripped in multiple ways cater to a variety of preferences.
For example, people with smaller hands may struggle to get sufficient grip on a large object, while people with larger hands may find it difficult to fit into their fingers into holes or loops, or to press small buttons.
Some products require the use of two hands. A common scenario is that one hand is required to hold or stabilise the object, while the other performs fine precision movements. However, people can suffer from temporary or permanent impairments that reduce the capability of one or both hands. It is best to design products so that they can be used either one or two-handed where possible.
Other products assume that users are right-handed, e.g. placing precision controls where the left hand cannot easily reach. This should also be considered when determining the shape of the object and the placement of its controls.
Important things to consider in design are to:
- Allow different grips. Consider whether the shape of the product allows for a range of different types of grips, to suit the requirements of different users.
- Help users to change grip. Make it easy for users to move between one grip and another, for different purposes, e.g. picking up the product and then using it.
- Consider hand size. Consider the smallest and largest hands that will potentially interact with the product. Examine whether the product remains comfortable to grip and use for these hand sizes. Data on hand sizes is often available from ergonomic data sources, such as those described in Further information.
- Consider clearance. Consider whether there is sufficient space and clearance for people with large fingers.
- Allow ambidextrous use. Try to ensure the product can be used left or right handed, and one or two-handed.

The shape of the product should enable a range of different grip positions.

The ease with which products can be gripped and manipulated is affected by the size of one’s hands.
Product shape: Suitability for the task
Different grip positions are best suited for different tasks. Power grips involve the thumb, all four fingers and the palm of the hand, often wrapped around an object. These grips are most suited to tasks requiring large forces, such as picking up heavy objects or opening a jar.
The shape of an object can encourage a power grip by fitting neatly with the shape of the palm, or providing clear places to position the fingers and thumb. For example, the OXO Good Grips vegetable peeler fits neatly into the palm of the hand with the fingers wrapped around it. This type of grip enables force to be applied with the whole of one’s hand, which is well-suited to peeling vegetables.
Other tasks require precision but minimal force. They are better suited to pinch grips between the thumb and fingers. Such tasks include manipulating controls such as knobs and sliders. Pinch grips can be encouraged (and required) by making the controls small enough that they have to be operated with the fingers.
Important things to consider in design are to:
- Promote good grips. Choose the shape of the product to promote the types of grips that are best suited for the task.
- Consider wrist position. Arrange gripping tasks so that they can be performed with the wrist in a neutral and straight position, where possible. This improves user comfort, and minimises pain for those with conditions such as arthritis.

The shapes of the OXO Good Grips scissors and vegetable peeler encourage the user to hold them in a power grip suitable for exerting force.
A pinch grip is more suitable for tasks requiring precision but minimal force.
Product shape: Ease of gripping
The shape of a product influences how easy it is to hold and turn. It is hard to hold an object with straight sides because it has a tendency to slip out of the hand, particularly if it is slippery. Extra force is required to overcome the effect of gravity. Adding a handle or shaping the sides of the object to provide a rim or ledge means that the object can rest on the hand naturally without the user having to grip it tightly. This results in lower force requirements. The grip is also more comfortable, more stable and less affected by surface water or sweat.
This is an example of a more general principle: it is easiest to apply force if you can push against something in doing so.
This principle can also be applied to turning knobs and controls. Turning a knob with a smooth surface can be difficult because there is nothing to push against. Force needs to be applied to get a grip on the knob in addition to the rotational force required to turn it. Adding ridges around the rim provides something to push against and reduces the force requirements. It is even easier if a central bar is added, allowing the knob to be turned using a looser pinch grip. In general, handles and levers are good ways to generate rotational motion because they are easy to grip and do not rely on frictional contact.
Important things to consider in design are to:
- Minimise strength requirements. Provide loops, handles or sudden changes in surface contours to help minimise the gripping strength required.
- Take care with turning controls. Consider using a handle or lever to generate rotational motion.
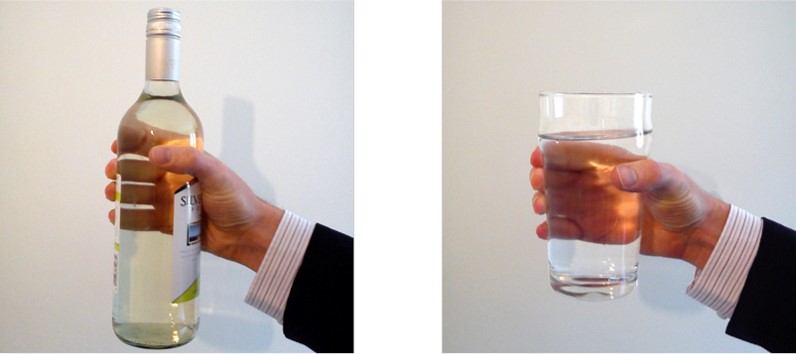
It is harder to hold a bottle with straight sides than a glass with shaped sides that rest on the hand.

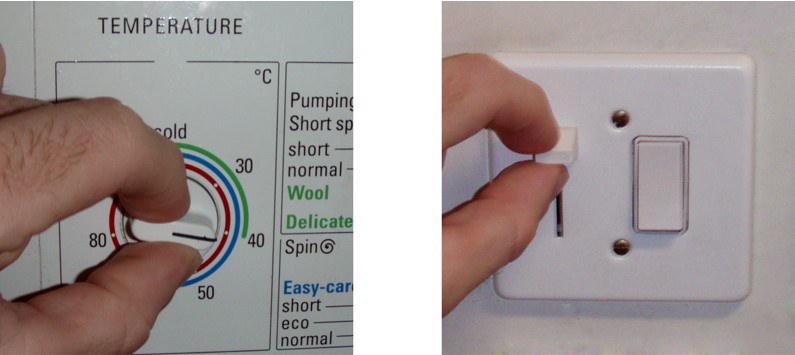
Turning a knob with a smooth surface can be difficult because there is nothing to push against, whereas a lever handle can generate the rotational force more effectively.
Product shape: Contact area
The grip on a product, its feel and how comfortable it is to use are influenced by the contact area between the object and the user’s palm.
Grip can be improved by making the contact area as large as possible. A rough surface texture and an elastic or viscoelastic surface (rubbery texture) on the contact area are easier to grip.
To ensure comfortable and safe operation, the pressure on the hand should be distributed evenly throughout the contact area and contact with any edges or corners should be avoided. This will also help the user to maintain a stable and secure contact over an extended period of time.
Important things to consider in design are to:
- Consider surface texture. Enable easier gripping by using a rough surface texture and/or an elastic or viscoelastic surface (rubbery texture) on the contact area, and by maximising the available contact area where possible.
- Distribute hand pressure. Distribute the pressure on the hand evenly across the contact area.
- Avoid sharp contact points. Avoid corners or edges coming into contact with the hand.

Providing a rough surface texture or an elastic or viscoelastic surface on the contact area improves grip.

Maximising the contact area with the palm and fingers also improves grip and reduces slipping.
Force requirements
Many products require some force to be exerted, e.g. to pick up an object, press a switch or open a jar. It is important to consider the amount of force required and whether it is likely to exceed the capacity of the users.
The level of force that is acceptable varies according to how it is applied. The simplest way of applying force is by pushing because there is no need for an opposing grip. The movement and force are aligned in the same direction. Users can also apply a much larger force if they can use their body weight to help push away from their body, e.g. when opening a door. If the surface to be pushed is vertical, then either the palm of the hand must be aligned with the vertical surface, or the fingers must be used to transmit the force. Both of these can be a source of pain. The pushing force can be generated more comfortably if the surface is contoured to fit the hand with a neutral wrist position.
If force needs to be applied while gripping an object, the force requirements can be reduced by adding rims, loops and handles as discussed in Ease of gripping above.
Pushing up and down is used to depress buttons and sliders, e.g., on a toaster. It is more comfortable to push down than up, because the wrist has to rotate 180 degrees if the palm is required to push upwards.
Pushing left or right can be required to push a button on the side of a product, or to push a product from side to side. It is easier to push things towards the body centre-line than away from it, because this wrist position is more natural.
Important things to consider in design are to:
- Consider force requirements. Consider whether the task requires excessive force and adjust it accordingly.
- Enable pushing. Try to facilitate product interaction that only requires the user to generate pushing forces.
- Provide gripping aids. If it is necessary to apply force while gripping, provide loops, handles or sudden changes in surface contours to help minimise the gripping strength required.
- Consider force direction. Choose interactions that allow the user to push down in preference to pushing up, and push towards the body rather than away from it.
- Consider wrist position. Consider using pushing surfaces that fit a hand with a neutral wrist position.

Pushing forces can be generated more comfortably if the surface allows for a neutral wrist position.

It is more comfortable to push down than up, and towards the body centre-line than away from it.
Precision requirements
Products often require precision movements, particularly in manipulating controls. The user must press the correct button and not another, or move a knob or slider to just the right position. While the force requirements involved in these tasks are often minimal, the precision requirements are high.
These tasks can be made more difficult by conditions such as arthritis, stroke, cerebral palsy and developmental disabilities. For example, arthritis reduces the range of motion in the knuckle joints. Some conditions such as Parkinson’s can cause tremors which make precision movements difficult.
One way to examine the effect of reduced strength and range of motion in one’s hands is to try using the product while wearing the Cambridge Simulation Gloves.
Important things to consider in design are to:
- Consider precision requirements. Consider whether the task requires excessive precision and adjust it accordingly.
- Consider vision and dexterity. Avoid tasks that require both vision and dexterity to align things precisely, e.g. lining up a connector with a connection slot.
- Avoid complicated movements. Note that controls requiring simultaneous movements in different directions (such as combined pushing and twisting) are particularly difficult for those with reduced motor control.
- Use a simulator. Try using the product while wearing the Cambridge Simulation Gloves to discover some of the difficulties for people with reduced strength and motion in their hands.

Wearing the Cambridge Simulation Gloves illustrates some of the issues with precision tasks faced by people with reduced strength and range of motion in their hands.

The phone charger on the left has a connection slots that requires aligning, while the headphone jack on the right is simpler and easier to insert.
Other task requirements
It is important to be aware of other task requirements and the demands that they place on the user, and to try to reduce these as much as possible. In particular:
- Duration: It is much harder for users if they are required to maintain a force or grip over an extended period of time. The force requirements in such an operation need to be lower than in a similar short-term operation. For example, holding a product in front of you for several minutes while you operate its controls or read its instructions is much harder than picking it up momentarily. It is therefore more important to reduce its weight.
- Repetition: Typing on a keyboard and other such extremely repetitive tasks can cause Repetitive Strain Injury. Avoid such tasks where possible.
- Lateral wrist movement: Avoid tasks that require lateral motion of the wrist as they can cause discomfort for people with wrist strain, and are impossible for those with wrists in plaster or splints. An easy way to test this is to see if your design can be used while wearing wrist splints.
- Task failure: Minimise consequences of task failure, e.g. by ensuring that products do not break when dropped.
- Feedback: Provide feedback on the appropriateness of the forces generated, e.g. design screw caps to get progressively tighter as they are turned.

Holding a product in front of you while you use it or read information on it is much harder than picking it up momentarily.
Environmental context
The ability to perform dexterity tasks that rely on friction can be impaired by the environmental context. A higher strength is required if the hand is sweaty, wet or covered in lubricating substances that are common in workshops or kitchen environments.
Cold temperatures also affect hand function. The flexibility and sensitivity of the fingers decreases with temperature. Wearing insulating or protective clothing such as gloves can also make it harder to operate controls on products.
Vibration, motion and the visibility of the hands can affect the ability to grip or make precision movements. The user may need to rely on touch in low light levels or when the hands and product are not visible.

Kitchen environments contain substances such as fine powders and oils, which can make controls more difficult to use.

Wearing insulating or protective gloves can make it harder to operate controls on products.
Population statistics
Reach and dexterity involves several different capabilities. The graphs on the right give population data for lifting strength, dexterity and reaching forward and up with the dominant hand. The graphs show the proportion of the British adult population living in private households who would be excluded by tasks with the following levels of demand.
Lifting strength (dominant hand)
- No demand: Strength is not required from the dominant hand/arm
- Mug: Pick up and hold mug of coffee by the handle
- Pint of milk: Pick up and carry bottle of wine or glass bottle of milk without condensation
- Bag of potatoes: Pick up and carry plastic bag of shopping containing four pints of milk
Dexterity (dominant hand)
- No demand: No need to make any precision hand movements
- Control knob: Turn the control knob of a cooker
- Safety pin: Pick up safety pin from a table-top using your fingers
- Use pen: Use pen to write
Reaching forward and up (dominant hand)
- No demand: No need to reach forward or up
- Shake hands: Reach forward to shake hands
- Reach head: Reach up to put hat on head
- Above head: Reach something just above head for a few seconds
These graphs were derived from the Disability Follow-Up to the 1996/97 Family Resources Survey, see the page on Assessing demand and exclusion for details. At the time of the survey, the GB adult population living in private households was 43.3 million.
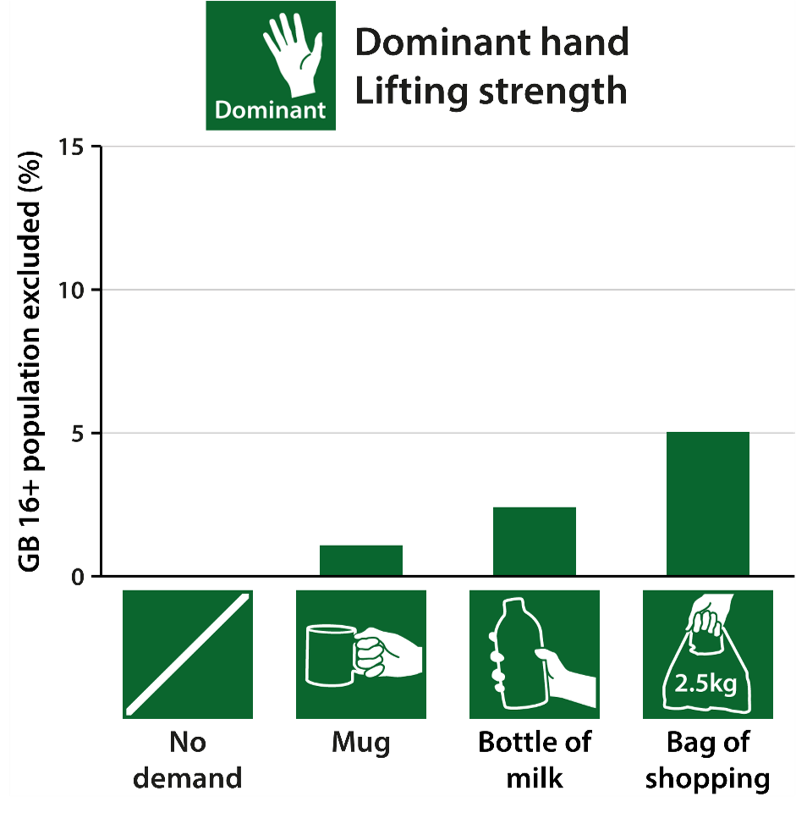
The proportion of the British adult population excluded by tasks with various levels of lifting demand.
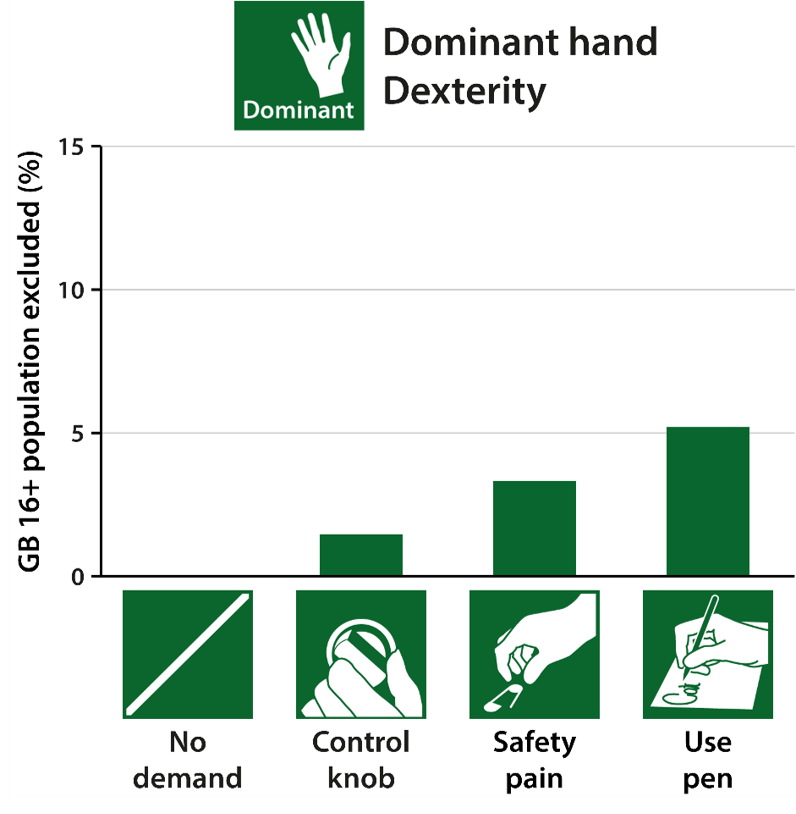
The proportion of the British adult population excluded by tasks with various levels of dexterity demand.
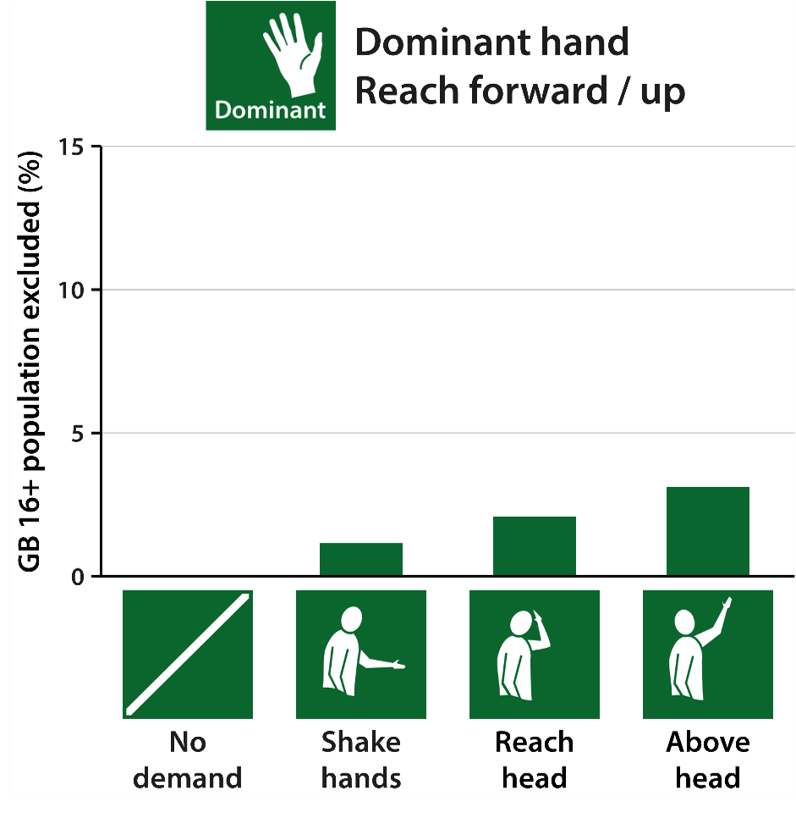
The proportion of the British adult population excluded by tasks with various levels of reaching demand.
Further information
Statistics on the numbers of people in Great Britain with different levels of reach and dexterity capability can be found by using the Exclusion Calculator at calc.inclusivedesigntoolkit.com.
Some examples of ergonomic data sources that include information on reach, strength and dexterity measurements include:
- Tilley AR (2002). The Measure of Man and Woman, John Wiley & Sons, New York, USA. ISBN 0-471-09955-4.
- Peebles L, Norris B (1998). Adultdata: The Handbook of Adult Anthropomorphic and Strength Measurements - Data for Design Safety. Department of Trade and Industry, UK.
- Smith S, Norris B, Peebles L (2000). Older Adultdata: The Handbook of Measurements and Capabilities of the Older Adult - Data for Design Safety. Department of Trade and Industry, UK.
- PeopleSize 2020 is a downloadable anthropometric dataset. Different versions are available for different prices.
There are also various guidelines on ergonomics, such as:
- Pheasant S (1987). Ergonomics - Standards and Guidelines for Designers. British Standards Institution.

People Size 2008 is a downloadable anthropometric dataset.
Feedback
We would welcome your feedback on this page:
Privacy policy. If your feedback comments warrant follow-up communication, we will send you an email using the details you have provided. Feedback comments are anonymized and then stored on our file server. If you select the option to receive or contribute to the news bulletin, we will store your name and email address on our file server for the purposes of managing your subscription. You can unsubscribe and have your details deleted at any time, by using our Unsubscribe form. If you select the option to receive an activation code, we will store your name and email address on our fileserver indefinitely. This information will only be used to contact you for the specific purpose that you have indicated; it will not be shared. We use this personal information with your consent, which you can withdraw at any time.
Read more about how we use your personal data. Any e-mails that are sent or received are stored on our mail server for up to 24 months.